|
| | mitkClassMacro (NDIPassiveTool, TrackingTool) |
| |
| virtual bool | LoadSROMFile (const char *filename) |
| | load a srom tool description file
|
| |
| virtual const unsigned char * | GetSROMData () const |
| | get loaded srom file as unsigned char array
|
| |
| virtual unsigned int | GetSROMDataLength () const |
| | get length of SROMData char array
|
| |
| | itkSetStringMacro (PortHandle) |
| | get port handle under which the tool is registered in the tracking device
|
| |
| | itkGetStringMacro (PortHandle) |
| | set port handle under which the tool is registered in the tracking device
|
| |
| | itkSetMacro (TrackingPriority, TrackingPriority) |
| | set tracking priority that the ndi tracking device should use
|
| |
| | itkGetConstMacro (TrackingPriority, TrackingPriority) |
| | get tracking priority that the ndi tracking device should use
|
| |
| | itkSetStringMacro (SerialNumber) |
| | set serial number of the tool
|
| |
| | itkGetStringMacro (SerialNumber) |
| | get serial number of the tool
|
| |
| | itkGetStringMacro (File) |
| | get file from which this tool was loaded
|
| |
| | mitkClassMacroItkParent (TrackingTool, itk::Object) |
| |
| | itkFactorylessNewMacro (Self) |
| |
| | itkCloneMacro (Self) |
| |
| void | PrintSelf (std::ostream &os, itk::Indent indent) const override |
| |
| virtual const char * | GetToolName () const |
| | every tool has a name thatgit can be used to identify it.
|
| |
| virtual void | SetToolName (const std::string _arg) |
| | Sets the name of the tool.
|
| |
| virtual void | SetToolName (const char *_arg) |
| | Sets the name of the tool.
|
| |
| Point3D | GetToolTipPosition () const |
| | returns the tool tip in tool coordinates, which where set by SetToolTip
|
| |
| Quaternion | GetToolAxisOrientation () const |
| | returns the transformation of the tool axis with respect to the MITK-IGT main tool axis (0,0,-1)
|
| |
| virtual void | SetToolTipPosition (Point3D toolTipPosition, Quaternion orientation, ScalarType eps=0.0) |
| | defines a tool tip for this tool in tool coordinates. GetPosition() and GetOrientation() return the data of the tool tip if it is defined. By default no tooltip is defined.
|
| |
| virtual bool | IsToolTipSet () const |
| | returns true if a tool tip is set, false if not
|
| |
| virtual void | GetPosition (Point3D &position) const |
| | returns the current position of the tool as an array of three floats (in the tracking device coordinate system)
|
| |
| virtual void | SetPosition (Point3D position) |
| | sets the position
|
| |
| virtual void | GetOrientation (Quaternion &orientation) const |
| | returns the current orientation of the tool as a quaternion in a mitk::Point4D (in the tracking device coordinate system)
|
| |
| virtual void | SetOrientation (Quaternion orientation) |
| | sets the orientation as a quaternion
|
| |
| virtual bool | Enable () |
| | enables the tool, so that it will be tracked
|
| |
| virtual bool | Disable () |
| | disables the tool, so that it will not be tracked anymore
|
| |
| virtual bool | IsEnabled () const |
| | returns whether the tool is enabled or disabled
|
| |
| virtual void | SetDataValid (bool isDataValid) |
| | sets if the tracking data (position & orientation) is valid
|
| |
| virtual bool | IsDataValid () const |
| | returns true if the current position data is valid (no error during tracking, tracking error below threshold, ...)
|
| |
| virtual float | GetTrackingError () const |
| | returns one value that corresponds to the overall tracking error.
|
| |
| virtual void | SetTrackingError (float error) |
| | sets the tracking error
|
| |
| virtual const char * | GetErrorMessage () const |
| | if the data is not valid, ErrorMessage should contain a string explaining why it is invalid (the Set-method should be implemented in subclasses, it should not be accessible by the user)
|
| |
| virtual void | SetErrorMessage (const char *_arg) |
| | sets the error message
|
| |
| | itkSetMacro (IGTTimeStamp, double) itkGetConstMacro(IGTTimeStamp |
| |
|
| unsigned char * | m_SROMData |
| | content of the srom tool description file
|
| |
| unsigned int | m_SROMDataLength |
| | length of the srom tool description file
|
| |
| TrackingPriority | m_TrackingPriority |
| | priority for this tool
|
| |
| std::string | m_PortHandle |
| | port handle for this tool
|
| |
| std::string | m_SerialNumber |
| | serial number for this tool
|
| |
| std::string | m_File |
| | the original file from which this tool was loaded
|
| |
| std::string | m_ToolName |
| | every tool has a name that can be used to identify it.
|
| |
| std::string | m_ErrorMessage |
| | if a tool is invalid, this member should contain a human readable explanation of why it is invalid
|
| |
| double | m_IGTTimeStamp |
| | contains the time at which the tracking data was recorded
|
| |
| std::mutex | m_MyMutex |
| | mutex to control concurrent access to the tool
|
| |
| Point3D | m_Position |
| | holds the position of the tool in global tracking coordinates
|
| |
| Quaternion | m_Orientation |
| | holds the orientation of the tool´in global tracking coordinates
|
| |
| float | m_TrackingError |
| | holds the tracking error of the tool
|
| |
| bool | m_Enabled |
| | if true, tool is enabled and should receive tracking updates from the tracking device
|
| |
| bool | m_DataValid |
| | if true, data in m_Position and m_Orientation is valid, e.g. true tracking data
|
| |
| Point3D | m_ToolTipPosition |
| | holds the position of the tool tip in the coordinate system of the tracking sensor
|
| |
| Quaternion | m_ToolAxisOrientation |
| | holds the rotation of the sensor coordinate system such that the z-axis coincides with the main tool axis e.g. obtained by a tool calibration
|
| |
| bool | m_ToolTipSet |
| |
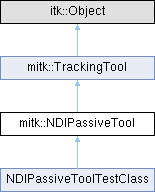
Implementation of a passive NDI optical tool.
Documentation
implements the TrackingTool interface and has the ability to load an srom file that contains the marker configuration for that tool
Definition at line 31 of file mitkNDIPassiveTool.h.
 Public Member Functions inherited from mitk::TrackingTool
Public Member Functions inherited from mitk::TrackingTool