Device class representing a PMD CamBoard camera. More...
#include <mitkToFCameraPMDRawDataCamBoardDevice.h>
Public Member Functions | |
| mitkClassMacro (ToFCameraPMDRawDataCamBoardDevice, ToFCameraPMDRawDataDevice) | |
| itkFactorylessNewMacro (Self) | |
| itkCloneMacro (Self) virtual void SetProperty(const char *propertyKey | |
| set a BaseProperty | |
| virtual void | GetChannelSourceData (short *sourceData, vtkShortArray *vtkChannelArray) |
| Transforms the sourceData into an array with four tuples holding the channels for raw data reconstruction. | |
| bool | ConnectCamera () |
| Establishes camera connection and sets the class variables. | |
| void | GetIntensities (float *intensityArray, int &imageSequence) |
| Returns intensity data. | |
| void | GetAmplitudes (float *amplitudeArray, int &imageSequence) |
| Returns amplitude data. | |
| void | GetDistances (float *distanceArray, int &imageSequence) |
| Returns distance data. | |
| void | GetAllImages (float *distanceArray, float *amplitudeArray, float *intensityArray, char *sourceDataArray, int requiredImageSequence, int &capturedImageSequence, unsigned char *rgbDataArray=nullptr) |
| Returns all image data at once. | |
 Public Member Functions inherited from mitk::ToFCameraPMDRawDataDevice Public Member Functions inherited from mitk::ToFCameraPMDRawDataDevice | |
| mitkClassMacro (ToFCameraPMDRawDataDevice, ToFCameraDevice) | |
| itkFactorylessNewMacro (Self) | |
| itkCloneMacro (Self) | |
| itkSetMacro (ChannelSize, int) | |
| itkGetMacro (ChannelSize, int) | |
| virtual bool | OnConnectCamera () |
| opens a connection to the ToF camera | |
| virtual bool | DisconnectCamera () |
| closes the connection to the camera | |
| virtual void | StartCamera () |
| starts the continuous updating of the camera. A separate thread updates the source data, the main thread processes the source data and creates images and coordinates | |
| virtual void | StopCamera () |
| stops the continuous updating of the camera | |
| virtual void | UpdateCamera () |
| updates the camera for image acquisition | |
| virtual bool | IsCameraActive () |
| returns whether the camera is currently active or not | |
| ToFCameraPMDController::Pointer | GetController () |
| returns the corresponding camera controller | |
| virtual void | SetProperty (const char *propertyKey, BaseProperty *propertyValue) |
| set a BaseProperty | |
| Public Member Functions inherited from mitk::ToFCameraDevice | |
| mitkClassMacroItkParent (ToFCameraDevice, itk::Object) | |
| virtual bool | IsCameraConnected () |
| returns true if the camera is connected | |
| itkGetMacro (CaptureWidth, int) | |
| get the currently set capture width | |
| itkGetMacro (CaptureHeight, int) | |
| get the currently set capture height | |
| itkGetMacro (SourceDataSize, int) | |
| get the currently set source data size | |
| itkGetMacro (BufferSize, int) | |
| get the currently set buffer size | |
| itkGetMacro (MaxBufferSize, int) | |
| get the currently set max buffer size | |
| void | SetBoolProperty (const char *propertyKey, bool boolValue) |
| set a bool property in the property list | |
| void | SetIntProperty (const char *propertyKey, int intValue) |
| set an int property in the property list | |
| void | SetFloatProperty (const char *propertyKey, float floatValue) |
| set a float property in the property list | |
| void | SetStringProperty (const char *propertyKey, const char *stringValue) |
| set a string property in the property list | |
| virtual BaseProperty * | GetProperty (const char *propertyKey) |
| get a BaseProperty from the property list | |
| bool | GetBoolProperty (const char *propertyKey, bool &boolValue) |
| get a bool from the property list | |
| bool | GetStringProperty (const char *propertyKey, std::string &string) |
| get a string from the property list | |
| bool | GetIntProperty (const char *propertyKey, int &integer) |
| get an int from the property list | |
| virtual int | GetRGBCaptureWidth () |
| virtual int | GetRGBCaptureHeight () |
Public Attributes | |
| BaseProperty * | propertyValue |
Protected Member Functions | |
| ToFCameraPMDRawDataCamBoardDevice () | |
| ~ToFCameraPMDRawDataCamBoardDevice () | |
| Protected Member Functions inherited from mitk::ToFCameraPMDRawDataDevice | |
| ToFCameraPMDRawDataDevice () | |
| ~ToFCameraPMDRawDataDevice () | |
| virtual void | AllocateSourceData () |
| method for allocating m_SourceDataArray and m_SourceDataBuffer | |
| virtual void | CleanUpSourceData () |
| method for cleaning up memory allocated for m_SourceDataArray and m_SourceDataBuffer | |
| virtual void | AllocatePixelArrays () |
| method for allocating memory for pixel arrays m_IntensityArray, m_DistanceArray and m_AmplitudeArray | |
| virtual void | CleanupPixelArrays () |
| method for cleanup memory allocated for pixel arrays m_IntensityArray, m_DistanceArray and m_AmplitudeArray | |
| void | GetNextPos () |
| moves the position pointer m_CurrentPos to the next position in the buffer if that's not the next free position to prevent reading from an empty buffer | |
| void | XYAxisFlipImage (float *imageData, float *&flippedData, int xAxis, int yAxis, int dimension=1) |
| gets the image data and flips it according to user needs Caution! The user is responsible for allocating and deleting the data. | |
| Protected Member Functions inherited from mitk::ToFCameraDevice | |
| ToFCameraDevice () | |
| ~ToFCameraDevice () override | |
Additional Inherited Members | |
| Static Protected Member Functions inherited from mitk::ToFCameraPMDRawDataDevice | |
| static ITK_THREAD_RETURN_TYPE | Acquire (void *pInfoStruct) |
| Thread method continuously acquiring images from the ToF hardware. | |
| Protected Attributes inherited from mitk::ToFCameraPMDRawDataDevice | |
| ToFCameraPMDController::Pointer | m_Controller |
| corresponding CameraController | |
| ThreadedToFRawDataReconstruction::Pointer | m_RawDataSource |
| char ** | m_SourceDataBuffer |
| buffer holding the last acquired images | |
| char * | m_SourceDataArray |
| array holding the current PMD source data | |
| short * | m_ShortSourceData |
| array holding the current PMD raw data | |
| unsigned int | m_OriginControllerWidth |
| holds the original controller width | |
| unsigned int | m_OriginControllerHeight |
| holds the original controller height | |
| Protected Attributes inherited from mitk::ToFCameraDevice | |
| float * | m_IntensityArray |
| float array holding the intensity image | |
| float * | m_DistanceArray |
| float array holding the distance image | |
| float * | m_AmplitudeArray |
| float array holding the amplitude image | |
| int | m_BufferSize |
| buffer size of the image buffer needed for loss-less acquisition of range data | |
| int | m_MaxBufferSize |
| maximal buffer size needed for initialization of data arrays. Default value is 100. | |
| int | m_CurrentPos |
| current position in the buffer which will be retrieved by the Get methods | |
| int | m_FreePos |
| current position in the buffer which will be filled with data acquired from the hardware | |
| int | m_CaptureWidth |
| width of the range image (x dimension) | |
| int | m_CaptureHeight |
| height of the range image (y dimension) | |
| int | m_PixelNumber |
| number of pixels in the range image (m_CaptureWidth*m_CaptureHeight) | |
| int | m_RGBImageWidth |
| width of the RGB image (x dimension) | |
| int | m_RGBImageHeight |
| height of the RGB image (y dimension) | |
| int | m_RGBPixelNumber |
| number of pixels in the range image (m_RGBImageWidth*m_RGBImageHeight) | |
| int | m_SourceDataSize |
| size of the PMD source data | |
| std::mutex | m_ImageMutex |
| mutex for images provided by the range camera | |
| std::mutex | m_CameraActiveMutex |
| mutex for the cameraActive flag | |
| std::thread | m_Thread |
| bool | m_CameraActive |
| flag indicating if the camera is currently active or not. Caution: thread safe access only! | |
| bool | m_CameraConnected |
| flag indicating if the camera is successfully connected or not. Caution: thread safe access only! | |
| int | m_ImageSequence |
| counter for acquired images | |
| PropertyList::Pointer | m_PropertyList |
| a list of the corresponding properties | |
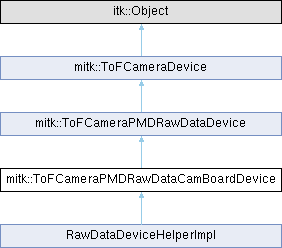
Detailed Description
Device class representing a PMD CamBoard camera.
Definition at line 28 of file mitkToFCameraPMDRawDataCamBoardDevice.h.
Constructor & Destructor Documentation
◆ ToFCameraPMDRawDataCamBoardDevice()
|
protected |
Definition at line 20 of file mitkToFCameraPMDRawDataCamBoardDevice.cpp.
◆ ~ToFCameraPMDRawDataCamBoardDevice()
|
protected |
Definition at line 25 of file mitkToFCameraPMDRawDataCamBoardDevice.cpp.
Member Function Documentation
◆ ConnectCamera()
|
virtual |
Establishes camera connection and sets the class variables.
Reimplemented from mitk::ToFCameraDevice.
Definition at line 29 of file mitkToFCameraPMDRawDataCamBoardDevice.cpp.
◆ GetAllImages()
|
virtual |
Returns all image data at once.
Reimplemented from mitk::ToFCameraPMDRawDataDevice.
Definition at line 118 of file mitkToFCameraPMDRawDataCamBoardDevice.cpp.
◆ GetAmplitudes()
|
virtual |
Returns amplitude data.
Reimplemented from mitk::ToFCameraPMDRawDataDevice.
Definition at line 79 of file mitkToFCameraPMDRawDataCamBoardDevice.cpp.
◆ GetChannelSourceData()
|
virtual |
Transforms the sourceData into an array with four tuples holding the channels for raw data reconstruction.
Reimplemented from mitk::ToFCameraPMDRawDataDevice.
Definition at line 43 of file mitkToFCameraPMDRawDataCamBoardDevice.cpp.
◆ GetDistances()
|
virtual |
Returns distance data.
Reimplemented from mitk::ToFCameraPMDRawDataDevice.
Definition at line 105 of file mitkToFCameraPMDRawDataCamBoardDevice.cpp.
◆ GetIntensities()
|
virtual |
Returns intensity data.
Reimplemented from mitk::ToFCameraPMDRawDataDevice.
Definition at line 92 of file mitkToFCameraPMDRawDataCamBoardDevice.cpp.
◆ itkCloneMacro()
| mitk::ToFCameraPMDRawDataCamBoardDevice::itkCloneMacro | ( | Self | ) | const |
set a BaseProperty
◆ itkFactorylessNewMacro()
| mitk::ToFCameraPMDRawDataCamBoardDevice::itkFactorylessNewMacro | ( | Self | ) |
◆ mitkClassMacro()
| mitk::ToFCameraPMDRawDataCamBoardDevice::mitkClassMacro | ( | ToFCameraPMDRawDataCamBoardDevice | , |
| ToFCameraPMDRawDataDevice | ) |
Member Data Documentation
◆ propertyValue
| BaseProperty* mitk::ToFCameraPMDRawDataCamBoardDevice::propertyValue |
Definition at line 40 of file mitkToFCameraPMDRawDataCamBoardDevice.h.
The documentation for this class was generated from the following files:
- Modules/ToFHardware/PMD/mitkToFCameraPMDRawDataCamBoardDevice.h
- Modules/ToFHardware/PMD/mitkToFCameraPMDRawDataCamBoardDevice.cpp