Helper class providing functions which are useful for multiple usage. More...
#include <mitkToFProcessingCommon.h>
Public Types | |
| typedef double | ToFScalarType |
| typedef itk::Point< ToFScalarType, 2 > | ToFPoint2D |
| typedef itk::Point< ToFScalarType, 3 > | ToFPoint3D |
| typedef itk::Vector< ToFScalarType, 2 > | ToFVector2D |
| typedef itk::Vector< ToFScalarType, 3 > | ToFVector3D |
Static Public Member Functions | |
| static ToFPoint3D | IndexToCartesianCoordinates (unsigned int i, unsigned int j, ToFScalarType distance, ToFScalarType focalLengthX, ToFScalarType focalLengthY, ToFScalarType principalPointX, ToFScalarType principalPointY) |
| Convert index based distances to cartesian coordinates. | |
| static ToFPoint3D | IndexToCartesianCoordinates (unsigned int i, unsigned int j, ToFScalarType distance, ToFPoint2D focalLength, ToFPoint2D principalPoint) |
| Convert index based distances to cartesian coordinates. | |
| static ToFPoint3D | IndexToCartesianCoordinates (itk::Index< 3 > index, ToFScalarType distance, ToFPoint2D focalLength, ToFPoint2D principalPoint) |
| Convert index based distances to cartesian coordinates. | |
| static ToFPoint3D | IndexToCartesianCoordinates (unsigned int i, unsigned int j, ToFScalarType distance, ToFScalarType focalLength[2], ToFScalarType principalPoint[2]) |
| Convenience method to convert index based distances to cartesian coordinates using array as input. | |
| static ToFPoint3D | IndexToCartesianCoordinatesWithInterpixdist (unsigned int i, unsigned int j, ToFScalarType distance, ToFScalarType focalLength, ToFScalarType interPixelDistanceX, ToFScalarType interPixelDistanceY, ToFScalarType principalPointX, ToFScalarType principalPointY) |
| Convert index based distances to cartesian coordinates. | |
| static ToFPoint3D | IndexToCartesianCoordinatesWithInterpixdist (unsigned int i, unsigned int j, ToFScalarType distance, ToFScalarType focalLength, ToFPoint2D interPixelDistance, ToFPoint2D principalPoint) |
| Convert index based distances to cartesian coordinates. | |
| static ToFPoint3D | IndexToCartesianCoordinatesWithInterpixdist (itk::Index< 3 > index, ToFScalarType distance, ToFScalarType focalLength, ToFPoint2D interPixelDistance, ToFPoint2D principalPoint) |
| Convert index based distances to cartesian coordinates. | |
| static ToFPoint3D | IndexToCartesianCoordinatesWithInterpixdist (unsigned int i, unsigned int j, ToFScalarType distance, ToFScalarType focalLength, ToFScalarType interPixelDistance[2], ToFScalarType principalPoint[2]) |
| Convenience method to convert index based distances to cartesian coordinates using array as input. | |
| static ToFPoint3D | CartesianToIndexCoordinates (ToFScalarType cartesianPointX, ToFScalarType cartesianPointY, ToFScalarType cartesianPointZ, ToFScalarType focalLengthX, ToFScalarType focalLengthY, ToFScalarType principalPointX, ToFScalarType principalPointY, bool calculateDistance=true) |
| Convert cartesian coordinates to index based distances. | |
| static ToFPoint3D | CartesianToIndexCoordinates (ToFScalarType cartesianPoint[3], ToFScalarType focalLength[2], ToFScalarType principalPoint[2], bool calculateDistance=true) |
| Convenience method to convert cartesian coordinates to index based distances using arrays. | |
| static ToFPoint3D | CartesianToIndexCoordinates (ToFPoint3D cartesianPoint, ToFPoint2D focalLength, ToFPoint2D principalPoint, bool calculateDistance=true) |
| Convert cartesian coordinates to index based distances. | |
| static ToFPoint3D | CartesianToIndexCoordinatesWithInterpixdist (ToFScalarType cartesianPointX, ToFScalarType cartesianPointY, ToFScalarType cartesianPointZ, ToFScalarType focalLength, ToFScalarType interPixelDistanceX, ToFScalarType interPixelDistanceY, ToFScalarType principalPointX, ToFScalarType principalPointY, bool calculateDistance=true) |
| Convert cartesian coordinates to index based distances. | |
| static ToFPoint3D | CartesianToIndexCoordinatesWithInterpixdist (ToFScalarType cartesianPoint[3], ToFScalarType focalLength, ToFScalarType interPixelDistance[2], ToFScalarType principalPoint[2], bool calculateDistance=true) |
| Convenience method to convert cartesian coordinates to index based distances using arrays. | |
| static ToFPoint3D | CartesianToIndexCoordinatesWithInterpixdist (ToFPoint3D cartesianPoint, ToFScalarType focalLength, ToFPoint2D interPixelDistance, ToFPoint2D principalPoint, bool calculateDistance=true) |
| Convert cartesian coordinates to index based distances. | |
| static ToFProcessingCommon::ToFPoint3D | KinectIndexToCartesianCoordinates (unsigned int i, unsigned int j, ToFScalarType distance, ToFScalarType focalLengthX, ToFScalarType focalLengthY, ToFScalarType principalPointX, ToFScalarType principalPointY) |
| KinectIndexToCartesianCoordinates Convert a pixel (i,j) with value d to a 3D world point. This conversion is meant for Kinect and slightly different then ToF reconstruction. See also "Hacking the Kinect" - Jeff Kramer, Matt Parker, Daniel Herrera C., Nicolas Burrus, Florian Echtler, Chapter 7, Part 1 "Moving from Depth Map to Point Cloud. | |
| static ToFPoint3D | KinectIndexToCartesianCoordinates (unsigned int i, unsigned int j, ToFScalarType distance, ToFScalarType focalLength[2], ToFScalarType principalPoint[2]) |
| static ToFPoint3D | KinectIndexToCartesianCoordinates (unsigned int i, unsigned int j, ToFScalarType distance, ToFPoint2D focalLength, ToFPoint2D principalPoint) |
| static ToFPoint3D | KinectIndexToCartesianCoordinates (itk::Index< 3 > index, ToFScalarType distance, ToFPoint2D focalLength, ToFPoint2D principalPoint) |
| static ToFPoint3D | CartesianToKinectIndexCoordinates (ToFScalarType cartesianPointX, ToFScalarType cartesianPointY, ToFScalarType cartesianPointZ, ToFScalarType focalLengthX, ToFScalarType focalLengthY, ToFScalarType principalPointX, ToFScalarType principalPointY, bool calculateDistance=true) |
| CartesianCoordinatesToKinectIndexCoordinates Transform a 3D world point back to distance image pixel coordinates. | |
| static ToFProcessingCommon::ToFPoint3D | CartesianToKinectIndexCoordinates (ToFPoint3D cartesianPoint, ToFPoint2D focalLength, ToFPoint2D principalPoint, bool calculateDistance=true) |
| static ToFProcessingCommon::ToFPoint3D | ContinuousKinectIndexToCartesianCoordinates (mitk::Point2D continuousIndex, ToFScalarType distance, ToFScalarType focalLengthX, ToFScalarType focalLengthY, ToFScalarType principalPointX, ToFScalarType principalPointY) |
| ContinuousKinectIndexToCartesianCoordinates This method is escpially meant for reconstructing a Kinect point with continuous index coordinates (i.e. not exactly a pixel position, but a point interpolated between two pixels). The only difference to KinectIndexToCartesianCoordinates() is that ContinuousKinectIndexToCartesianCoordinates does not cast to unsigned int for the index. | |
| static ToFScalarType | CalculateViewAngle (mitk::CameraIntrinsics::Pointer intrinsics, unsigned int dimX) |
| Calculates the horizontal view angle of the camera with the given intrinsics. | |
Detailed Description
Helper class providing functions which are useful for multiple usage.
Currently the following methods are provided:
- Conversion from 2D image coordinates to 3D world coordinates (IndexToCartesianCoordinates())
- Conversion from 3D world coordinates to 2D image coordinates (CartesianToIndexCoordinates())
The coordinate conversion follows the model of a common pinhole camera where the origin of the camera coordinate system (world coordinates) is at the pinhole
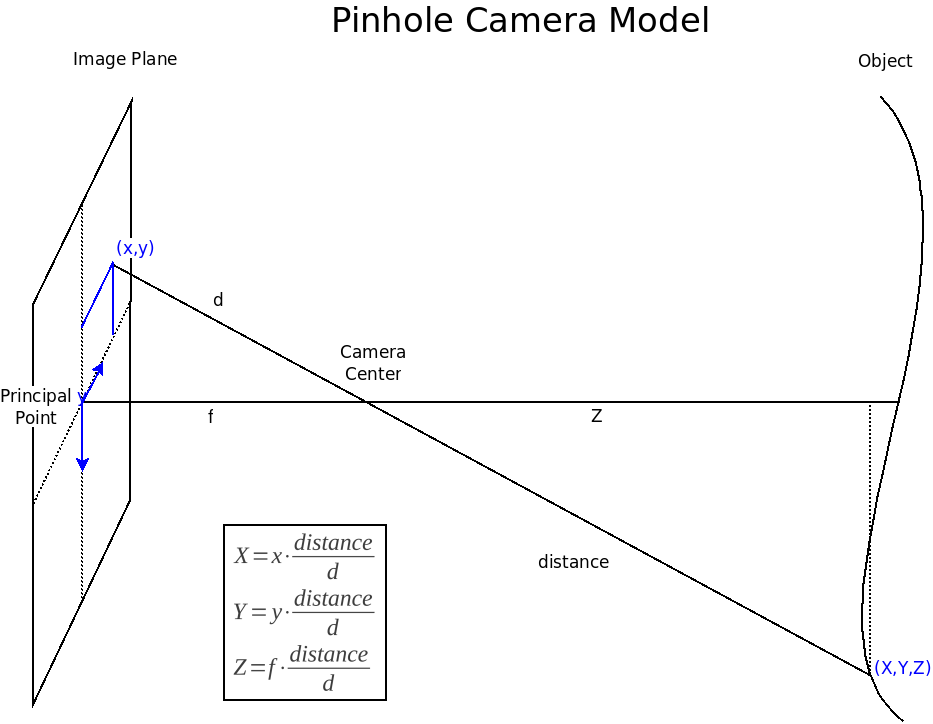
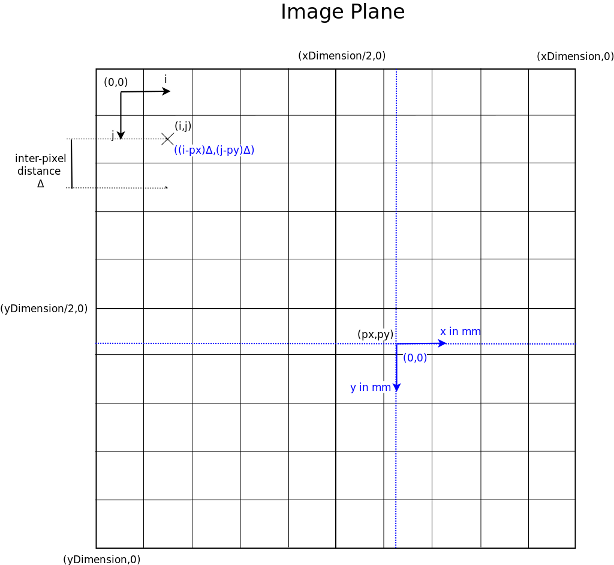
The definition of the image plane and its coordinate systems (pixel and mm) is depicted in the following image
Definition at line 38 of file mitkToFProcessingCommon.h.
Member Typedef Documentation
◆ ToFPoint2D
| itk::Point<ToFScalarType, 2> mitk::ToFProcessingCommon::ToFPoint2D |
Definition at line 42 of file mitkToFProcessingCommon.h.
◆ ToFPoint3D
| itk::Point<ToFScalarType, 3> mitk::ToFProcessingCommon::ToFPoint3D |
Definition at line 43 of file mitkToFProcessingCommon.h.
◆ ToFScalarType
Definition at line 41 of file mitkToFProcessingCommon.h.
◆ ToFVector2D
| itk::Vector<ToFScalarType, 2> mitk::ToFProcessingCommon::ToFVector2D |
Definition at line 44 of file mitkToFProcessingCommon.h.
◆ ToFVector3D
| itk::Vector<ToFScalarType, 3> mitk::ToFProcessingCommon::ToFVector3D |
Definition at line 45 of file mitkToFProcessingCommon.h.
Member Function Documentation
◆ CalculateViewAngle()
|
static |
Calculates the horizontal view angle of the camera with the given intrinsics.
- Parameters
-
intrinsics intrinsic parameters of the camera dimX dimension of the image in horizontal direction
angle = atan(principalPoint[0]/focalLength[0]) + atan((dimX-principalPoint[0]/focalLength[0]))
Definition at line 160 of file mitkToFProcessingCommon.cpp.
◆ CartesianToIndexCoordinates() [1/3]
|
inlinestatic |
Convert cartesian coordinates to index based distances.
- Parameters
-
cartesianPoint point (of a surface or point set) to convert in 3D coordinates focalLength focal length of optical system in pixel units (mostly obtained from camera calibration) principalPoint coordinates of principal point on image plane in pixel calculateDistance if this flag is set, the distance value is stored in the z position of the output otherwise z=0
- Returns
- a ToFPoint3D. (int)ToFPoint3D[0]+0.5 and (int)ToFPoint3D[0]+0.5 will return the x and y index coordinates. ToFPoint3D[2] contains the distance value
Definition at line 204 of file mitkToFProcessingCommon.h.
◆ CartesianToIndexCoordinates() [2/3]
|
inlinestatic |
Convenience method to convert cartesian coordinates to index based distances using arrays.
- Parameters
-
cartesianPoint point (of a surface or point set) to convert in 3D coordinates focalLength focal length of optical system in pixel units (mostly obtained from camera calibration) principalPoint coordinates of principal point on image plane in pixel calculateDistance if this flag is set, the distance value is stored in the z position of the output otherwise z=0
- Returns
- a ToFPoint3D. (int)ToFPoint3D[0]+0.5 and (int)ToFPoint3D[0]+0.5 will return the x and y index coordinates. ToFPoint3D[2] contains the distance value
Definition at line 190 of file mitkToFProcessingCommon.h.
◆ CartesianToIndexCoordinates() [3/3]
|
static |
Convert cartesian coordinates to index based distances.
- Parameters
-
cartesianPointX x coordinate of point (of a surface or point set) to convert in 3D coordinates cartesianPointY y coordinate of point (of a surface or point set) to convert in 3D coordinates cartesianPointZ z coordinate of point (of a surface or point set) to convert in 3D coordinates focalLengthX focal length of optical system in pixel units in x-direction (mostly obtained from camera calibration) focalLengthY focal length of optical system in pixel units in y-direction (mostly obtained from camera calibration) principalPointX x coordinate of principal point on image plane in pixel principalPointY y coordinate of principal point on image plane in pixel calculateDistance if this flag is set, the distance value is stored in the z position of the output otherwise z=0
- Returns
- a ToFPoint3D. (int)ToFPoint3D[0]+0.5 and (int)ToFPoint3D[0]+0.5 will return the x and y index coordinates. ToFPoint3D[2] contains the distance value
Definition at line 92 of file mitkToFProcessingCommon.cpp.
◆ CartesianToIndexCoordinatesWithInterpixdist() [1/3]
|
inlinestatic |
Convert cartesian coordinates to index based distances.
- Parameters
-
cartesianPoint point (of a surface or point set) to convert in 3D coordinates focalLength focal length of optical system in mm (mostly obtained from camera calibration) interPixelDistance distance between adjacent pixels in mm for x and y direction principalPoint coordinates of principal point on image plane in pixel calculateDistance if this flag is set, the distance value is stored in the z position of the output otherwise z=0
- Returns
- a ToFPoint3D. (int)ToFPoint3D[0]+0.5 and (int)ToFPoint3D[0]+0.5 will return the x and y index coordinates. ToFPoint3D[2] contains the distance value
Definition at line 254 of file mitkToFProcessingCommon.h.
◆ CartesianToIndexCoordinatesWithInterpixdist() [2/3]
|
inlinestatic |
Convenience method to convert cartesian coordinates to index based distances using arrays.
- Parameters
-
cartesianPoint point (of a surface or point set) to convert in 3D coordinates focalLength focal length of optical system in mm (mostly obtained from camera calibration) interPixelDistance distance between adjacent pixels in mm for x and y direction principalPoint coordinates of principal point on image plane in pixel calculateDistance if this flag is set, the distance value is stored in the z position of the output otherwise z=0
- Returns
- a ToFPoint3D. (int)ToFPoint3D[0]+0.5 and (int)ToFPoint3D[0]+0.5 will return the x and y index coordinates. ToFPoint3D[2] contains the distance value
Definition at line 238 of file mitkToFProcessingCommon.h.
◆ CartesianToIndexCoordinatesWithInterpixdist() [3/3]
|
static |
Convert cartesian coordinates to index based distances.
- Parameters
-
cartesianPointX x coordinate of point (of a surface or point set) to convert in 3D coordinates cartesianPointY y coordinate of point (of a surface or point set) to convert in 3D coordinates cartesianPointZ z coordinate of point (of a surface or point set) to convert in 3D coordinates focalLength focal length of optical system in mm (mostly obtained from camera calibration) interPixelDistanceX distance in x direction between adjacent pixels in mm interPixelDistanceY distance in y direction between adjacent pixels in mm principalPointX x coordinate of principal point on image plane in pixel principalPointY y coordinate of principal point on image plane in pixel calculateDistance if this flag is set, the distance value is stored in the z position of the output otherwise z=0
- Returns
- a ToFPoint3D. (int)ToFPoint3D[0]+0.5 and (int)ToFPoint3D[0]+0.5 will return the x and y index coordinates. ToFPoint3D[2] contains the distance value
Definition at line 124 of file mitkToFProcessingCommon.cpp.
◆ CartesianToKinectIndexCoordinates() [1/2]
|
inlinestatic |
Definition at line 308 of file mitkToFProcessingCommon.h.
◆ CartesianToKinectIndexCoordinates() [2/2]
|
static |
CartesianCoordinatesToKinectIndexCoordinates Transform a 3D world point back to distance image pixel coordinates.
- Parameters
-
cartesianPointX x value of the cartesian point. cartesianPointY y value of the cartesian point. cartesianPointZ z value of the cartesian point. focalLengthX x value of the focal length (from calibration). focalLengthY y value of the focal length (from calibration). principalPointX x value of the principal point (from calibration). principalPointY y value of the principal point (from calibration). calculateDistance Do you want to compute also the distance of the distance image? For Kinect, this value is always the same in cartesian and index coordinates.
- Returns
- A ToFPoint3D containing the pixel indices (i,j) in [0] and [1] and (optionally) the distance value in [2] (or just 0.0).
Definition at line 53 of file mitkToFProcessingCommon.cpp.
◆ ContinuousKinectIndexToCartesianCoordinates()
|
static |
ContinuousKinectIndexToCartesianCoordinates This method is escpially meant for reconstructing a Kinect point with continuous index coordinates (i.e. not exactly a pixel position, but a point interpolated between two pixels). The only difference to KinectIndexToCartesianCoordinates() is that ContinuousKinectIndexToCartesianCoordinates does not cast to unsigned int for the index.
- Parameters
-
continuousIndex The continuous coordinates (e.g. 0.5; 0.5). distance Distance value d in mm as obtained from OpenNI. focalLengthX x value of the focal length (from calibration). focalLengthY y value of the focal length (from calibration) principalPointX x value of the principal point (from calibration). principalPointY y value of the principal point (from calibration).
- Returns
- a ToFPoint3D. The point in world coordinates (mm).
Definition at line 149 of file mitkToFProcessingCommon.cpp.
◆ IndexToCartesianCoordinates() [1/4]
|
inlinestatic |
Convert index based distances to cartesian coordinates.
- Parameters
-
index index coordinates distance distance value at given index in mm focalLength focal length of optical system in pixel units (mostly obtained from camera calibration) principalPoint coordinates of principal point on image plane in pixel
- Returns
- cartesian coordinates for current index will be written here
Definition at line 84 of file mitkToFProcessingCommon.h.
◆ IndexToCartesianCoordinates() [2/4]
|
inlinestatic |
Convert index based distances to cartesian coordinates.
- Parameters
-
i index in x direction of image plane j index in y direction of image plane distance distance value at given index in mm focalLength focal length of optical system in pixel units (mostly obtained from camera calibration) principalPoint coordinates of principal point on image plane in pixel
- Returns
- cartesian coordinates for current index will be written here
Definition at line 70 of file mitkToFProcessingCommon.h.
◆ IndexToCartesianCoordinates() [3/4]
|
inlinestatic |
Convenience method to convert index based distances to cartesian coordinates using array as input.
- Parameters
-
i index in x direction of image plane j index in y direction of image plane distance distance value at given index in mm focalLength focal length of optical system in pixel units (mostly obtained from camera calibration) principalPoint coordinates of principal point on image plane in pixel
- Returns
- cartesian coordinates for current index will be written here
Definition at line 98 of file mitkToFProcessingCommon.h.
◆ IndexToCartesianCoordinates() [4/4]
|
static |
Convert index based distances to cartesian coordinates.
- Parameters
-
i index in x direction of image plane j index in y direction of image plane distance distance value at given index in mm focalLengthX focal length of optical system in pixel units in x-direction (mostly obtained from camera calibration) focalLengthY focal length of optical system in pixel units in y-direction (mostly obtained from camera calibration) principalPointX x coordinate of principal point on image plane in pixel principalPointY y coordinate of principal point on image plane in pixel
- Returns
- cartesian coordinates for current index will be written here
Definition at line 16 of file mitkToFProcessingCommon.cpp.
◆ IndexToCartesianCoordinatesWithInterpixdist() [1/4]
|
inlinestatic |
Convert index based distances to cartesian coordinates.
- Parameters
-
index index coordinates distance distance value at given index in mm focalLength focal length of optical system (mostly obtained from camera calibration) interPixelDistance distance between adjacent pixels in mm for x and y direction principalPoint coordinates of principal point on image plane in pixel
- Returns
- cartesian coordinates for current index will be written here
Definition at line 144 of file mitkToFProcessingCommon.h.
◆ IndexToCartesianCoordinatesWithInterpixdist() [2/4]
|
inlinestatic |
Convert index based distances to cartesian coordinates.
- Parameters
-
i index in x direction of image plane j index in y direction of image plane distance distance value at given index in mm focalLength focal length of optical system in mm (mostly obtained from camera calibration) interPixelDistance distance between adjacent pixels in mm principalPoint coordinates of principal point on image plane in pixel
- Returns
- cartesian coordinates for current index will be written here
Definition at line 130 of file mitkToFProcessingCommon.h.
◆ IndexToCartesianCoordinatesWithInterpixdist() [3/4]
|
inlinestatic |
Convenience method to convert index based distances to cartesian coordinates using array as input.
- Parameters
-
i index in x direction of image plane j index in y direction of image plane distance distance value at given index in mm focalLength focal length of optical system in mm (mostly obtained from camera calibration) interPixelDistance distance between adjacent pixels in mm principalPoint coordinates of principal point on image plane in pixel
- Returns
- cartesian coordinates for current index will be written here
Definition at line 159 of file mitkToFProcessingCommon.h.
◆ IndexToCartesianCoordinatesWithInterpixdist() [4/4]
|
static |
Convert index based distances to cartesian coordinates.
- Parameters
-
i index in x direction of image plane j index in y direction of image plane distance distance value at given index in mm focalLength focal length of optical system in mm (mostly obtained from camera calibration) interPixelDistanceX distance in x direction between adjacent pixels in mm interPixelDistanceY distance in y direction between adjacent pixels in mm principalPointX x coordinate of principal point on image plane in pixel principalPointY y coordinate of principal point on image plane in pixel
- Returns
- cartesian coordinates for current index will be written here
Definition at line 70 of file mitkToFProcessingCommon.cpp.
◆ KinectIndexToCartesianCoordinates() [1/4]
|
inlinestatic |
Definition at line 286 of file mitkToFProcessingCommon.h.
◆ KinectIndexToCartesianCoordinates() [2/4]
|
inlinestatic |
Definition at line 280 of file mitkToFProcessingCommon.h.
◆ KinectIndexToCartesianCoordinates() [3/4]
|
inlinestatic |
Definition at line 274 of file mitkToFProcessingCommon.h.
◆ KinectIndexToCartesianCoordinates() [4/4]
|
static |
KinectIndexToCartesianCoordinates Convert a pixel (i,j) with value d to a 3D world point. This conversion is meant for Kinect and slightly different then ToF reconstruction. See also "Hacking the Kinect" - Jeff Kramer, Matt Parker, Daniel Herrera C., Nicolas Burrus, Florian Echtler, Chapter 7, Part 1 "Moving from Depth Map to Point Cloud.
- Parameters
-
i Pixel index i. j Pixel index j. distance Distance value d in mm as obtained from OpenNI. focalLengthX Focallength from calibration. focalLengthY Focallength from calibration. principalPointX Principal point from calibration. principalPointY Principal point from calibration.
- Returns
- a ToFPoint3D. The point in world coordinates (mm).
Definition at line 41 of file mitkToFProcessingCommon.cpp.
The documentation for this class was generated from the following files:
- Modules/ToFProcessing/mitkToFProcessingCommon.h
- Modules/ToFProcessing/mitkToFProcessingCommon.cpp