Converts a Time-of-Flight (ToF) distance image to a PointSet using the pinhole camera model for coordinate computation. The intrinsic parameters of the camera (FocalLength, PrincipalPoint, InterPixelDistance) are set via SetIntrinsicParameters(). The measured distance for each pixel corresponds to the distance between the object point and the corresponding image point on the image plane. If a subset of indizes of the image is defined via SetSubset(), the output PointSet will only contain the cartesian coordinates of the corresponding 3D points. More...
#include <mitkToFDistanceImageToPointSetFilter.h>
Public Member Functions | |
| mitkClassMacro (ToFDistanceImageToPointSetFilter, PointSetSource) | |
| itkFactorylessNewMacro (Self) | |
| itkCloneMacro (Self) | |
| itkSetMacro (CameraIntrinsics, mitk::CameraIntrinsics::Pointer) | |
| itkGetMacro (CameraIntrinsics, mitk::CameraIntrinsics::Pointer) | |
| itkSetMacro (InterPixelDistance, mitk::ToFProcessingCommon::ToFPoint2D) | |
| itkGetMacro (InterPixelDistance, mitk::ToFProcessingCommon::ToFPoint2D) | |
| virtual void | SetInput (const Image *distanceImage) |
| Sets the input of this filter. | |
| virtual void | SetInput (unsigned int idx, const Image *distanceImage) |
| Sets the input of this filter at idx. | |
| Image * | GetInput () |
| Returns the input of this filter. | |
| Image * | GetInput (unsigned int idx) |
| Returns the input with id idx of this filter. | |
| void | SetSubset (std::vector< itk::Index< 3 > > subset) |
| If this subset is defined, the cartesian coordinates are only computed for the contained indizes. Make sure the indizes are contained in the input image. | |
| void | SetSubset (mitk::PointSet::Pointer pointSet) |
| Sets the subset of indizes used for caluclation of output PointSet as a PointSet. Warning: make sure the points in your PointSet are index coordinates. | |
| void | SetReconstructionMode (bool withoutInterpixdist=true) |
| Sets the reconstruction mode, if using no interpixeldistances and focal lenghts in pixel units (=true) or interpixeldistances and focal length in mm (=false) | |
| bool | GetReconstructionMode () |
| Returns the reconstruction mode. | |
Protected Member Functions | |
| ToFDistanceImageToPointSetFilter () | |
| Standard constructor. | |
| ~ToFDistanceImageToPointSetFilter () override | |
| Standard destructor. | |
| void | GenerateOutputInformation () override |
| void | GenerateData () override |
| Method generating the output of this filter. Called in the updated process of the pipeline. This method generates the output of the ToFSurfaceSource: The generated surface of the 3d points. | |
| void | CreateOutputsForAllInputs () |
| Create an output for each input. | |
Protected Attributes | |
| std::vector< itk::Index< 3 > > | m_Subset |
| If this subset is specified only the contained indizes are converted to cartesian coordinates. | |
| mitk::CameraIntrinsics::Pointer | m_CameraIntrinsics |
| Member holding the intrinsic parameters needed for PointSet calculation. | |
| ToFProcessingCommon::ToFPoint2D | m_InterPixelDistance |
| distance in mm between two adjacent pixels on the ToF camera chip | |
| bool | m_ReconstructionMode |
| true = Reconstruction without interpixeldistance and with focal lengths in pixel units. false = Reconstruction with interpixeldistance and with focal length in mm. | |
Detailed Description
Converts a Time-of-Flight (ToF) distance image to a PointSet using the pinhole camera model for coordinate computation. The intrinsic parameters of the camera (FocalLength, PrincipalPoint, InterPixelDistance) are set via SetIntrinsicParameters(). The measured distance for each pixel corresponds to the distance between the object point and the corresponding image point on the image plane. If a subset of indizes of the image is defined via SetSubset(), the output PointSet will only contain the cartesian coordinates of the corresponding 3D points.
The coordinate conversion follows the model of a common pinhole camera where the origin of the camera coordinate system (world coordinates) is at the pinhole
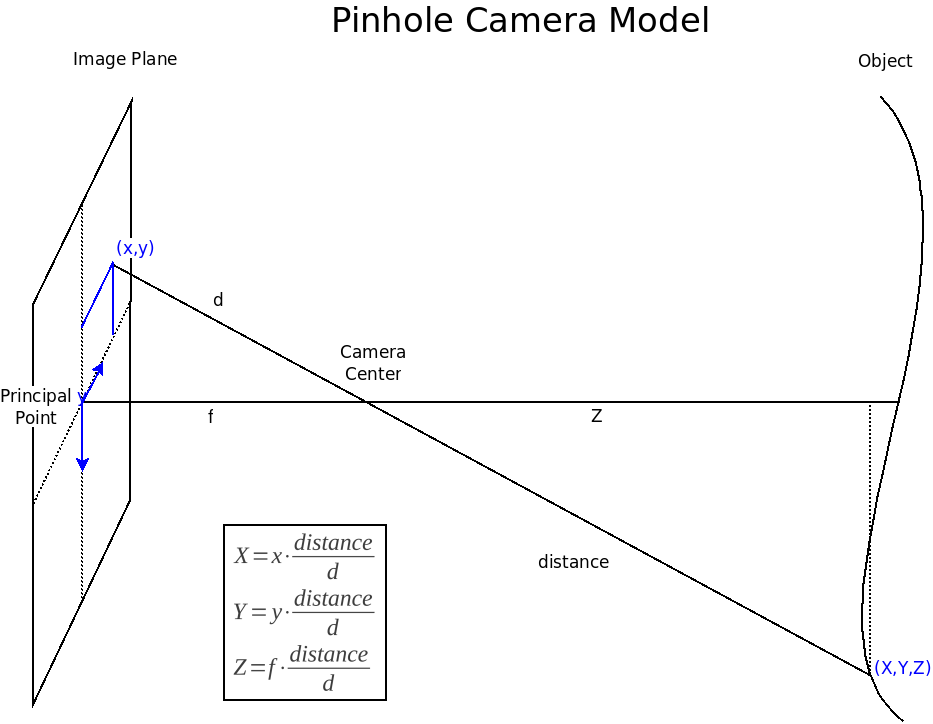
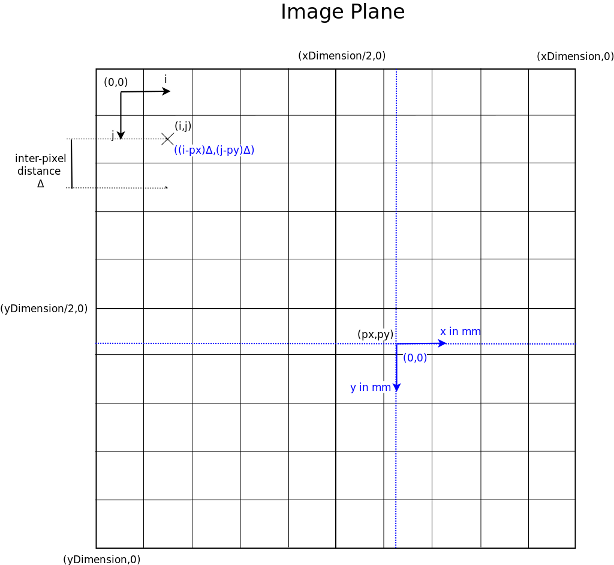
The definition of the image plane and its coordinate systems (pixel and mm) is depicted in the following image
Definition at line 43 of file mitkToFDistanceImageToPointSetFilter.h.
Constructor & Destructor Documentation
◆ ToFDistanceImageToPointSetFilter()
|
protected |
Standard constructor.
Definition at line 20 of file mitkToFDistanceImageToPointSetFilter.cpp.
◆ ~ToFDistanceImageToPointSetFilter()
|
overrideprotected |
Standard destructor.
Definition at line 31 of file mitkToFDistanceImageToPointSetFilter.cpp.
Member Function Documentation
◆ CreateOutputsForAllInputs()
|
protected |
Create an output for each input.
This Method sets the number of outputs to the number of inputs and creates missing outputs objects.
- Warning
- any additional outputs that exist before the method is called are deleted
Definition at line 195 of file mitkToFDistanceImageToPointSetFilter.cpp.
◆ GenerateData()
|
overrideprotected |
Method generating the output of this filter. Called in the updated process of the pipeline. This method generates the output of the ToFSurfaceSource: The generated surface of the 3d points.
Definition at line 115 of file mitkToFDistanceImageToPointSetFilter.cpp.
◆ GenerateOutputInformation()
|
overrideprotected |
Definition at line 207 of file mitkToFDistanceImageToPointSetFilter.cpp.
◆ GetInput() [1/2]
| mitk::Image * mitk::ToFDistanceImageToPointSetFilter::GetInput | ( | ) |
Returns the input of this filter.
Definition at line 53 of file mitkToFDistanceImageToPointSetFilter.cpp.
◆ GetInput() [2/2]
| mitk::Image * mitk::ToFDistanceImageToPointSetFilter::GetInput | ( | unsigned int | idx | ) |
Returns the input with id idx of this filter.
Definition at line 58 of file mitkToFDistanceImageToPointSetFilter.cpp.
◆ GetReconstructionMode()
| bool mitk::ToFDistanceImageToPointSetFilter::GetReconstructionMode | ( | ) |
Returns the reconstruction mode.
Definition at line 218 of file mitkToFDistanceImageToPointSetFilter.cpp.
◆ itkCloneMacro()
| mitk::ToFDistanceImageToPointSetFilter::itkCloneMacro | ( | Self | ) |
◆ itkFactorylessNewMacro()
| mitk::ToFDistanceImageToPointSetFilter::itkFactorylessNewMacro | ( | Self | ) |
◆ itkGetMacro() [1/2]
| mitk::ToFDistanceImageToPointSetFilter::itkGetMacro | ( | CameraIntrinsics | , |
| mitk::CameraIntrinsics::Pointer | ) |
◆ itkGetMacro() [2/2]
| mitk::ToFDistanceImageToPointSetFilter::itkGetMacro | ( | InterPixelDistance | , |
| mitk::ToFProcessingCommon::ToFPoint2D | ) |
◆ itkSetMacro() [1/2]
| mitk::ToFDistanceImageToPointSetFilter::itkSetMacro | ( | CameraIntrinsics | , |
| mitk::CameraIntrinsics::Pointer | ) |
◆ itkSetMacro() [2/2]
| mitk::ToFDistanceImageToPointSetFilter::itkSetMacro | ( | InterPixelDistance | , |
| mitk::ToFProcessingCommon::ToFPoint2D | ) |
◆ mitkClassMacro()
| mitk::ToFDistanceImageToPointSetFilter::mitkClassMacro | ( | ToFDistanceImageToPointSetFilter | , |
| PointSetSource | ) |
◆ SetInput() [1/2]
|
virtual |
Sets the input of this filter.
- Parameters
-
distanceImage input is the distance image of e.g. a ToF camera
Definition at line 35 of file mitkToFDistanceImageToPointSetFilter.cpp.
◆ SetInput() [2/2]
|
virtual |
Sets the input of this filter at idx.
- Parameters
-
idx number of the current input distanceImage input is the distance image of e.g. a ToF camera
Definition at line 40 of file mitkToFDistanceImageToPointSetFilter.cpp.
◆ SetReconstructionMode()
| void mitk::ToFDistanceImageToPointSetFilter::SetReconstructionMode | ( | bool | withoutInterpixdist = true | ) |
Sets the reconstruction mode, if using no interpixeldistances and focal lenghts in pixel units (=true) or interpixeldistances and focal length in mm (=false)
Definition at line 213 of file mitkToFDistanceImageToPointSetFilter.cpp.
◆ SetSubset() [1/2]
| void mitk::ToFDistanceImageToPointSetFilter::SetSubset | ( | mitk::PointSet::Pointer | pointSet | ) |
Sets the subset of indizes used for caluclation of output PointSet as a PointSet. Warning: make sure the points in your PointSet are index coordinates.
- Parameters
-
pointSet specified in index coordinates.
Definition at line 100 of file mitkToFDistanceImageToPointSetFilter.cpp.
◆ SetSubset() [2/2]
| void mitk::ToFDistanceImageToPointSetFilter::SetSubset | ( | std::vector< itk::Index< 3 > > | subset | ) |
If this subset is defined, the cartesian coordinates are only computed for the contained indizes. Make sure the indizes are contained in the input image.
- Parameters
-
subset index subset specified in index coordinates.
Definition at line 66 of file mitkToFDistanceImageToPointSetFilter.cpp.
Member Data Documentation
◆ m_CameraIntrinsics
|
protected |
Member holding the intrinsic parameters needed for PointSet calculation.
Definition at line 130 of file mitkToFDistanceImageToPointSetFilter.h.
◆ m_InterPixelDistance
|
protected |
distance in mm between two adjacent pixels on the ToF camera chip
Definition at line 131 of file mitkToFDistanceImageToPointSetFilter.h.
◆ m_ReconstructionMode
|
protected |
true = Reconstruction without interpixeldistance and with focal lengths in pixel units. false = Reconstruction with interpixeldistance and with focal length in mm.
Definition at line 132 of file mitkToFDistanceImageToPointSetFilter.h.
◆ m_Subset
|
protected |
If this subset is specified only the contained indizes are converted to cartesian coordinates.
Definition at line 129 of file mitkToFDistanceImageToPointSetFilter.h.
The documentation for this class was generated from the following files:
- Modules/ToFProcessing/mitkToFDistanceImageToPointSetFilter.h
- Modules/ToFProcessing/mitkToFDistanceImageToPointSetFilter.cpp